Auditolocomotiv.eu HVL, 2020
Bygge servobot (servorobot)

Vi bruker her Kodegenets servokontroll, som også kan leveres med et eget servobot-sett. Her bygger vi selve kassen selv, men det er absolutt verd å se på hvordan Kodegenet bygger sammen sin servobot.
Bilder fra prosjekt med elever: Auditolocomotiv – https://qrgo.page.link/wmUwg
1. Sette brakettene til servoene fast i platen
Pass på at brakettene (https://kurs.hvlkompetanse.no/kurs-for-l%C3%A6rere/
3d-modellering/kode-for-3d) står rett ovenfor hverandre.
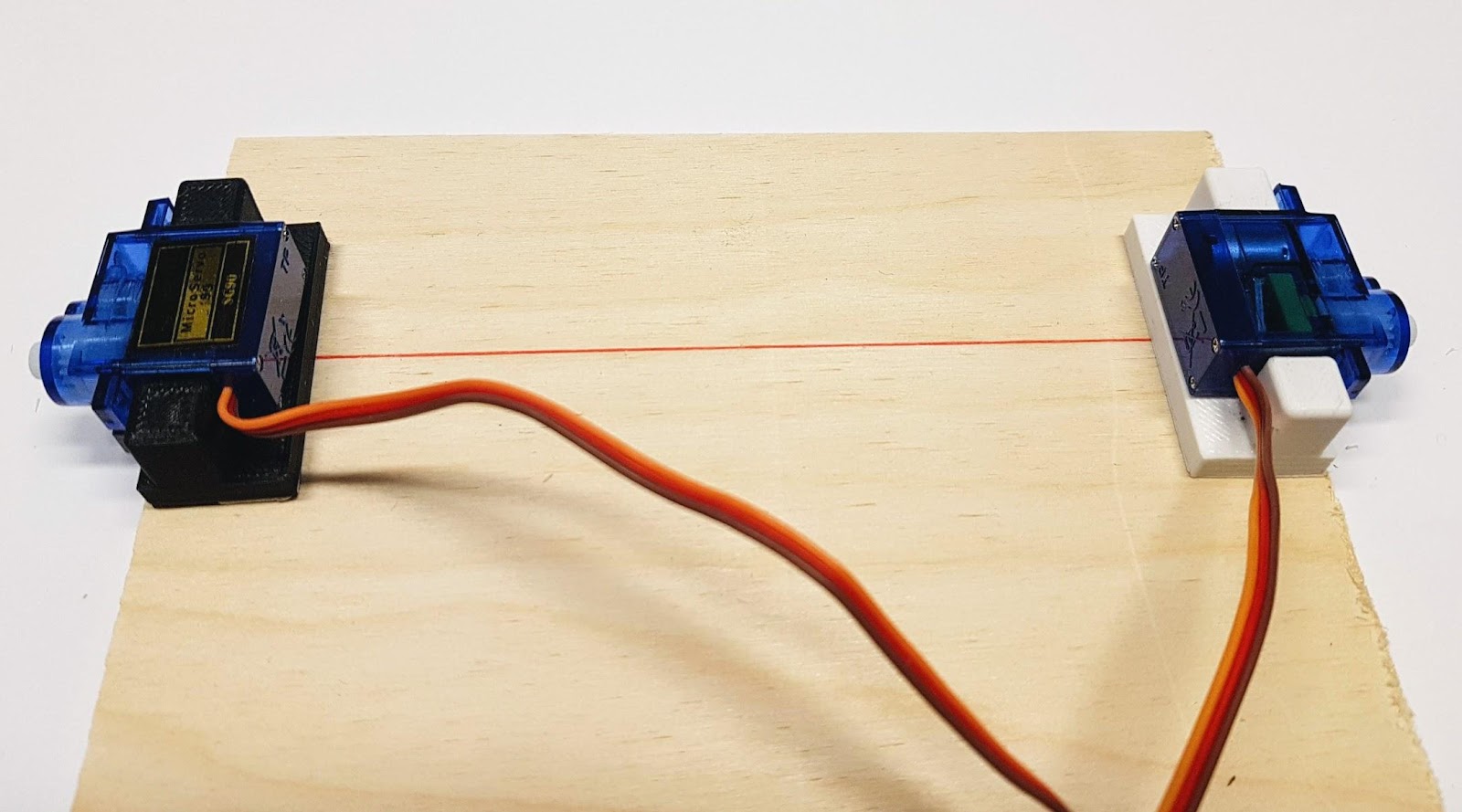
Legg merke til at servoene skal monteres hver sin vei, slik at akslingene (som hjulene festes på) kommer rett ovenfor hverandre. Ledningene skal peke bakover.
2. Fest støttehjul og “halen”
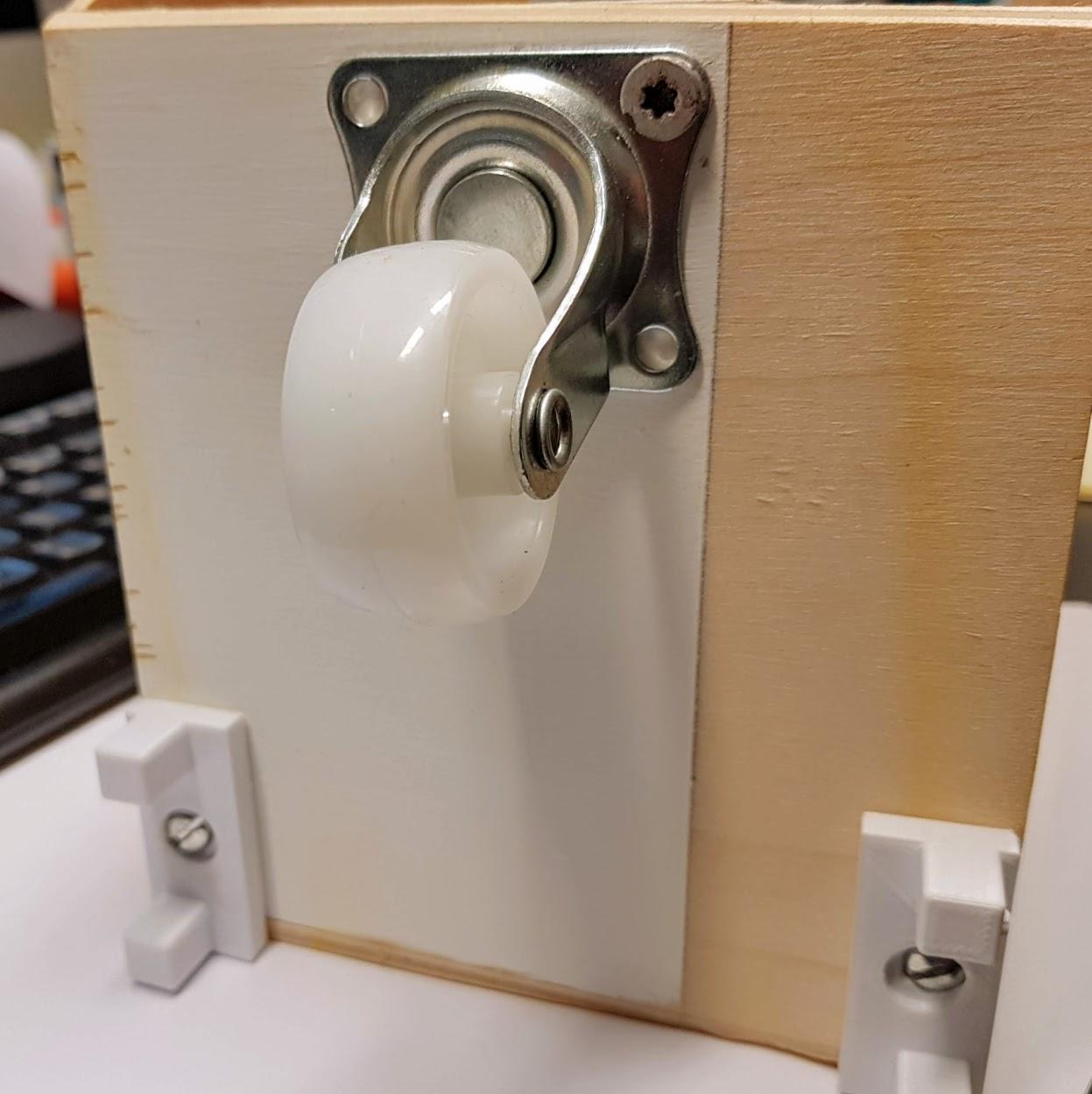
Servobotene trenger et støttehjul bakerst, som kan svinge med når servoene kjører av gårde.
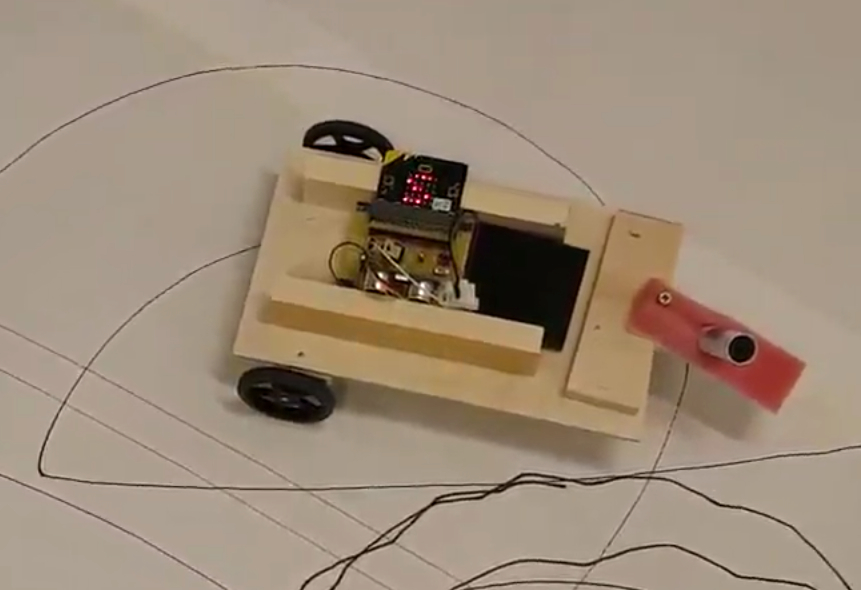
Vi skal også forsøke å tegne med servobotene. Vi har funnet ut at en halv kjøkkensvamp fungerer fint. Skru fast denne, bak eller på siden..
3. Monter ledningene
Alle servoer har tre ledninger. Vanligvis merket brunt, rød og gul/oransje.
- Brun – skal kobles sammen med Micro:bitens jord (GRD)
- Rød – kobles til batteripakkens positive pol (den røde ledningen) som gir strøm til servoene.
- Gul – kobles til de koblingspunktene på Micro:biten som skal styre de respektive servoene
Gitt at vi skal styre to servoer med én Micro:bit må vi koble sammen flere ledningen og det blir dermed litt jobb med å holde orden på alle ledningene. Det viktigste er å følge ledningene ut fra servoene og koble disse videre på riktig farge.
Wago-klemmer knytter sammen alle ledere som kobles til klemmen.
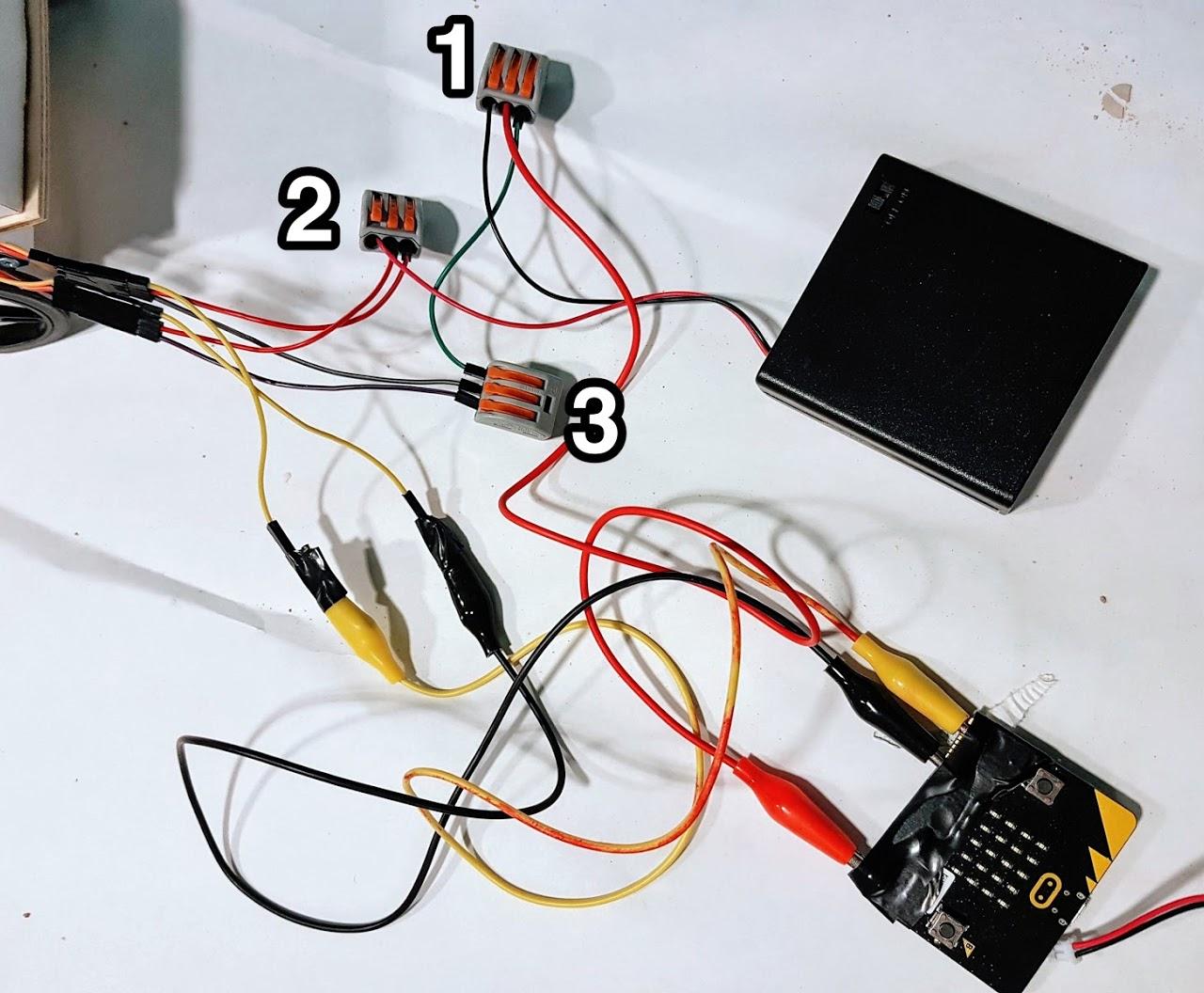
Punkt 1 – røde ledninger (jmf bildet på forrige side):
Vi begynner med de røde ledningene fra servoene. Sett en ledningsstump i kontakten ved den røde ledningen og koble dette til Wago-klemmen (merket [2] på bildet). Gjør dette med begge servoene.
Når de røde ledningen fra servoene er koblet til tar du den røde ledningen fra batteripakken og kobler denne til den siste åpningen i Wago-klemmen.
Punkt 2a – brune ledninger:
Vi tar nå de brune ledningene som kommer ut fra servoene.
Sett inn en ledningsstump i kontakten ved den brune ledningen og koble denne ledningen til en av Wago-klemmene (merket [3] på bildet). Gjør dette for begge servoene
En ekstra ledning kobles videre til en annen Wago-klemme (en “hjelpeklemme” som gjør det enklere å holde styr på ledningene)
Punkt 2b – "mellomkobling":
"Hjelpeklemmen", (merket [1] på bildet) har nå en ledning som kommer fra Wago-klemme [2]. I denne klemmen [1] kobles også den sorte ledningen fra batteripakken. Til slutt kobler vi en ledning med en krokodilleklemme, videre til jord (GND) på Microbiten (den røde krokodilleklemmen på bildet.
Punkt 3:
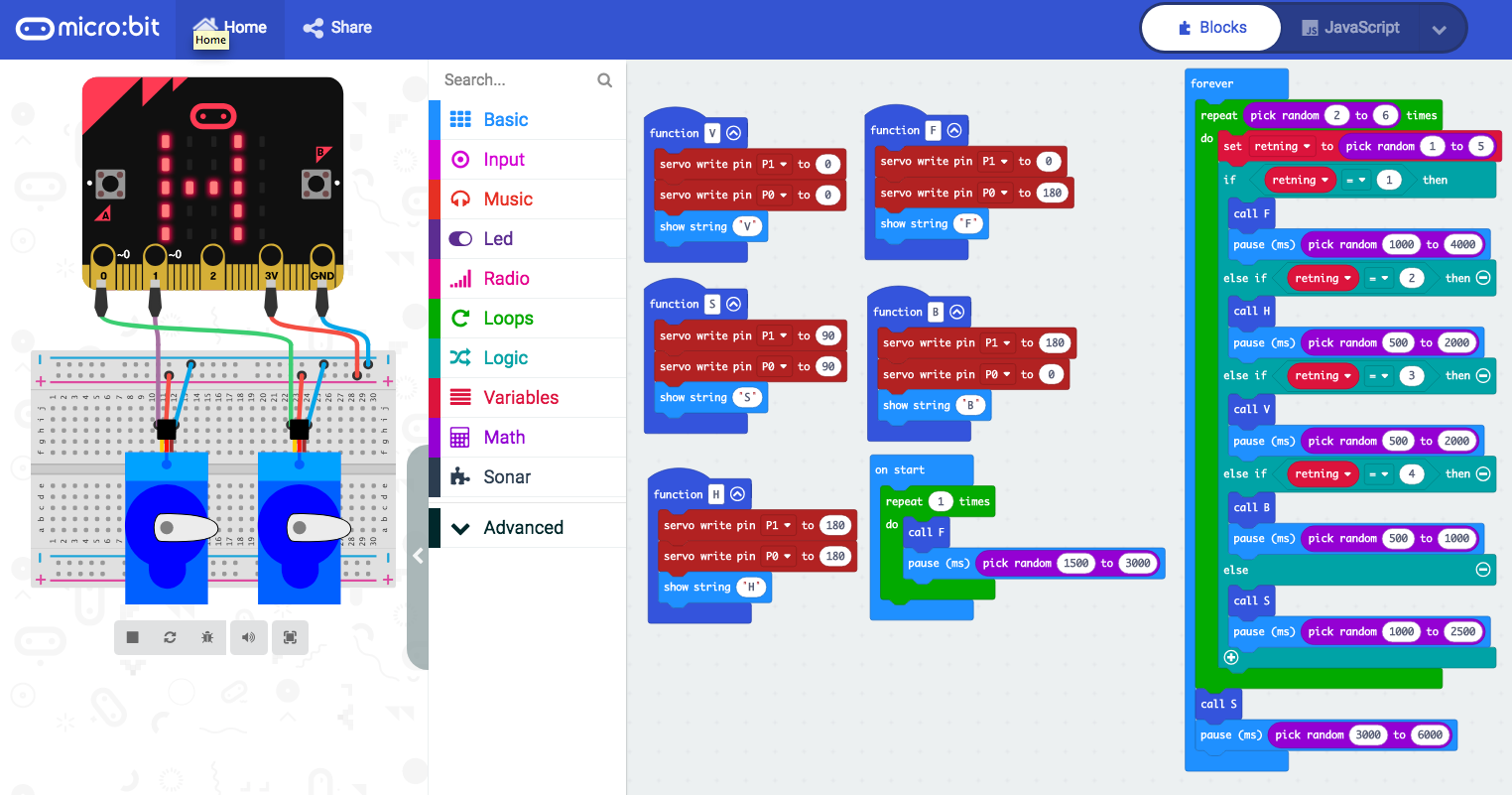
De siste kobling er å knyttet de gule ledningene fra servoene til kontakter på Micro:biten. Dette gjør at Micro:biten kan styre servoene. I vårt kodeeksempel har vi koblet disse ledningene til P0 (gul krokodilleklemme) og P1 (sort krokodilleklemme).
Punkt 4:
Test ved å laste ned kode på Micro:biten. Når du ser at du har kontroll på servoene kan du isolere koblingene med elektrikertape. Dette for at de ikke skal kortslutte når dere pakker alt inn i esken.